Detection distance (typical value) | Horizontal distance of 6km, with a maximum of 15km Vertical distance of 9km, with a maximum of 15km |
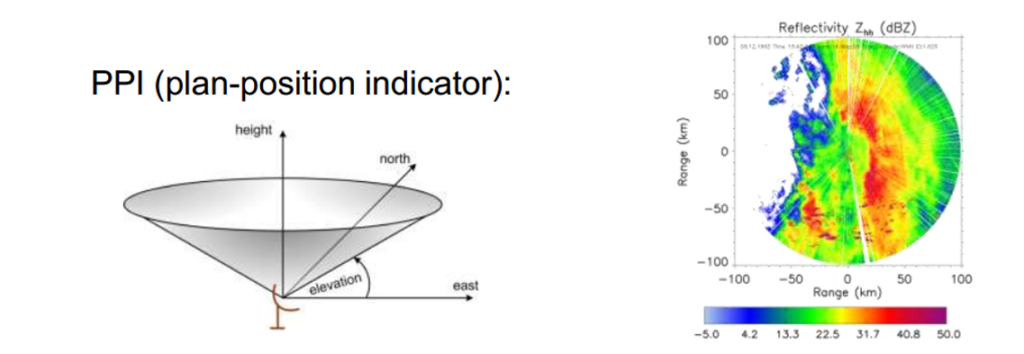
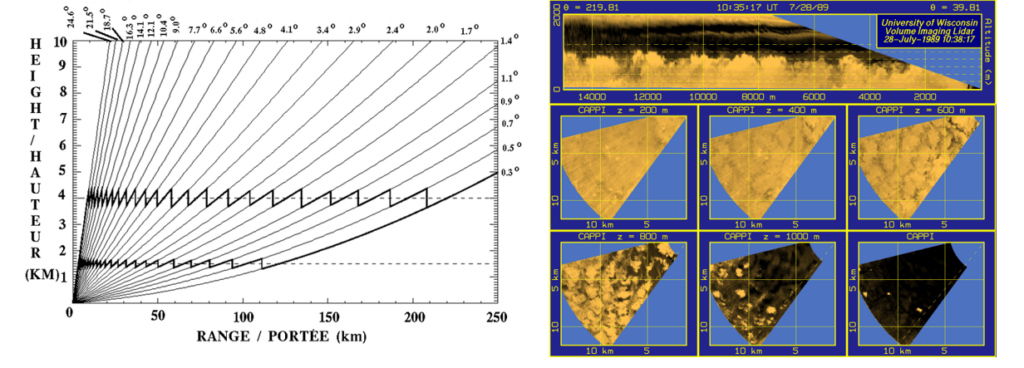
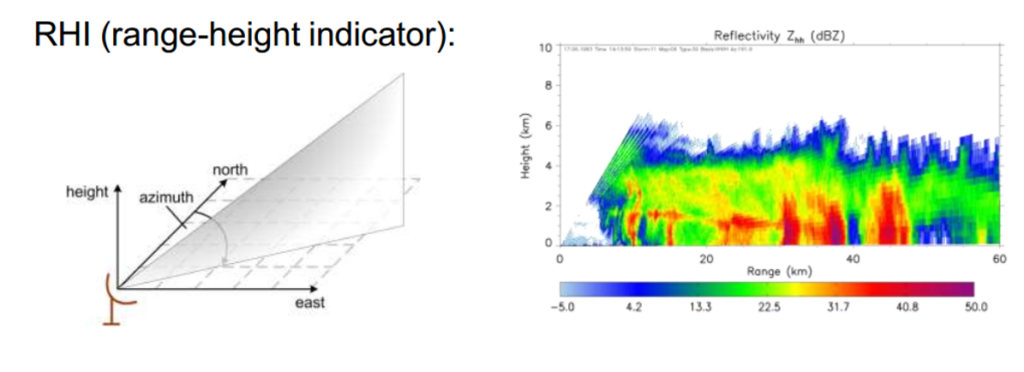
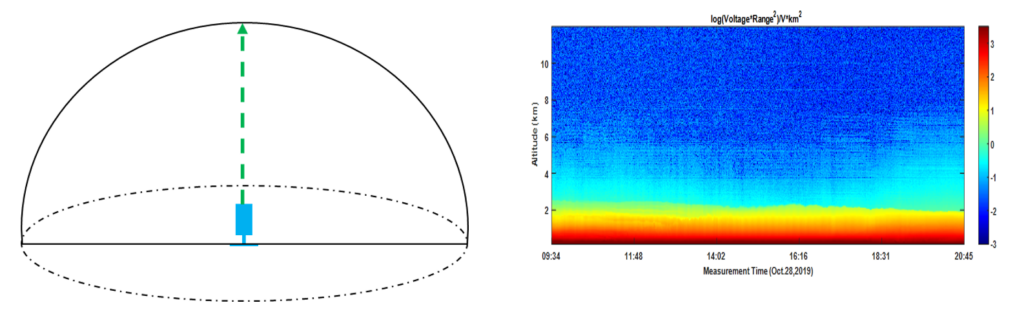
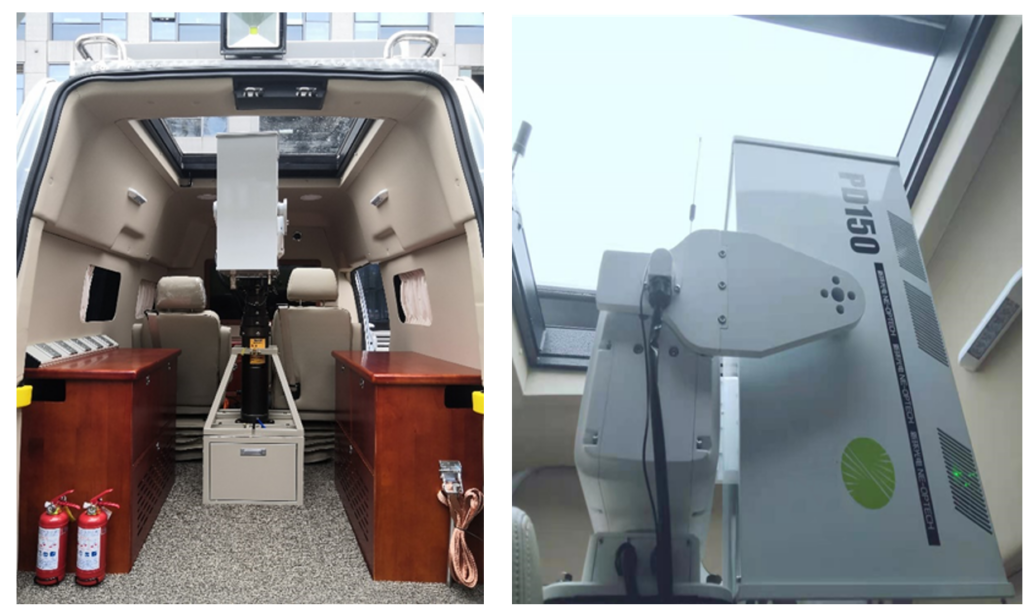
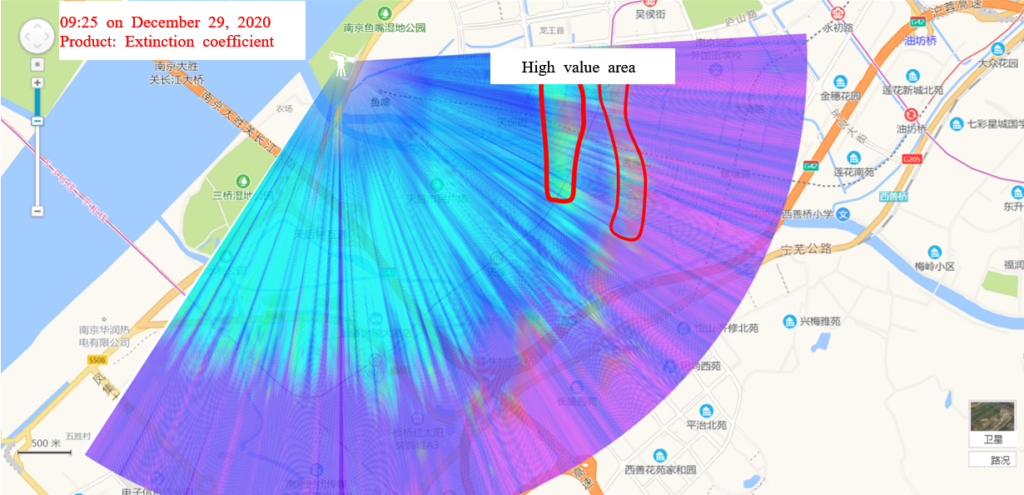
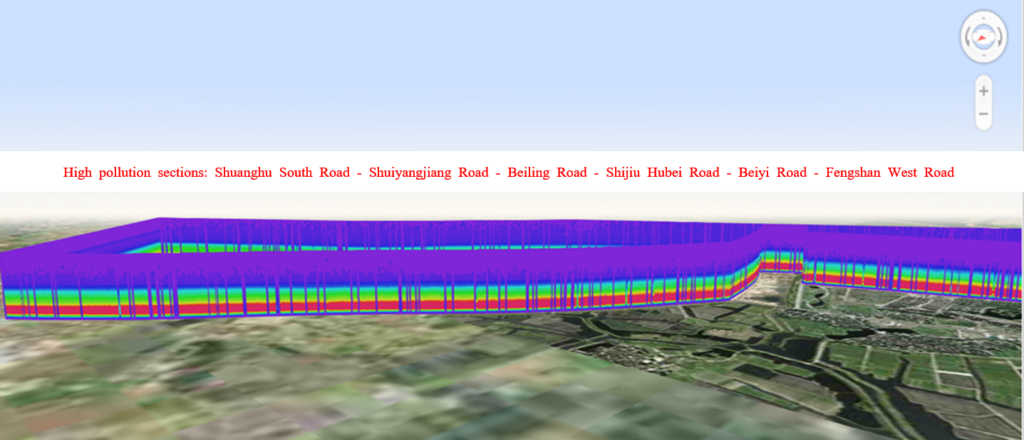
Detection mode | The following five scanning modes are supported: PPI – constant pitch angle; RHI – constant azimuth angle; THI – vertical observation; CAPPI – adjustable pitch angle; MO – mobile monitoring; Programming scanning mode (user-defined) |
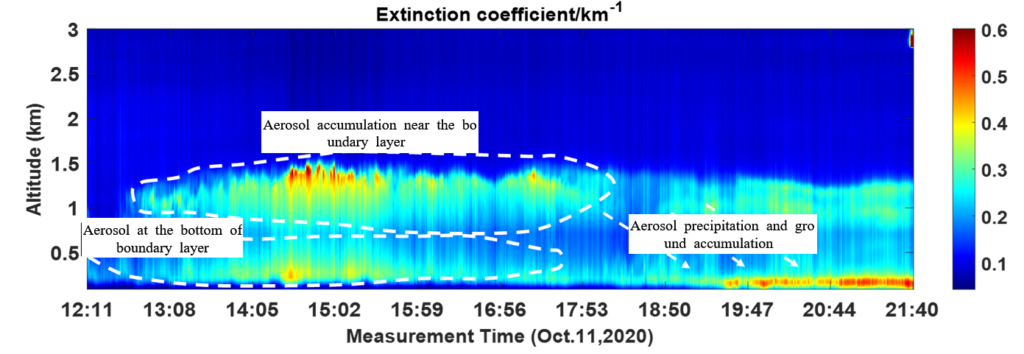
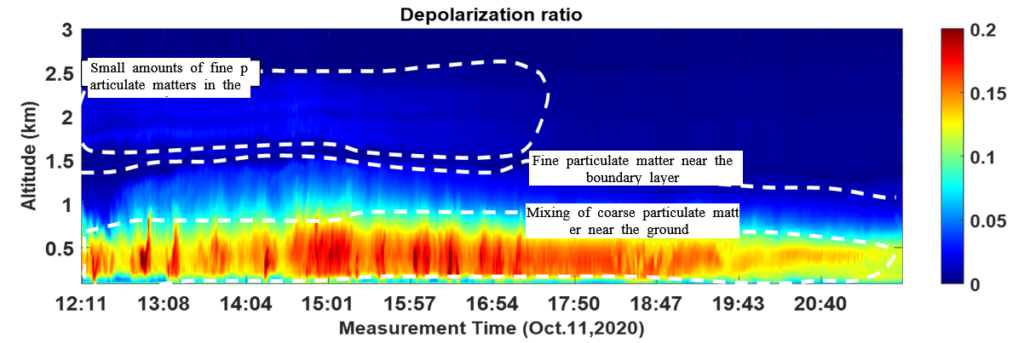
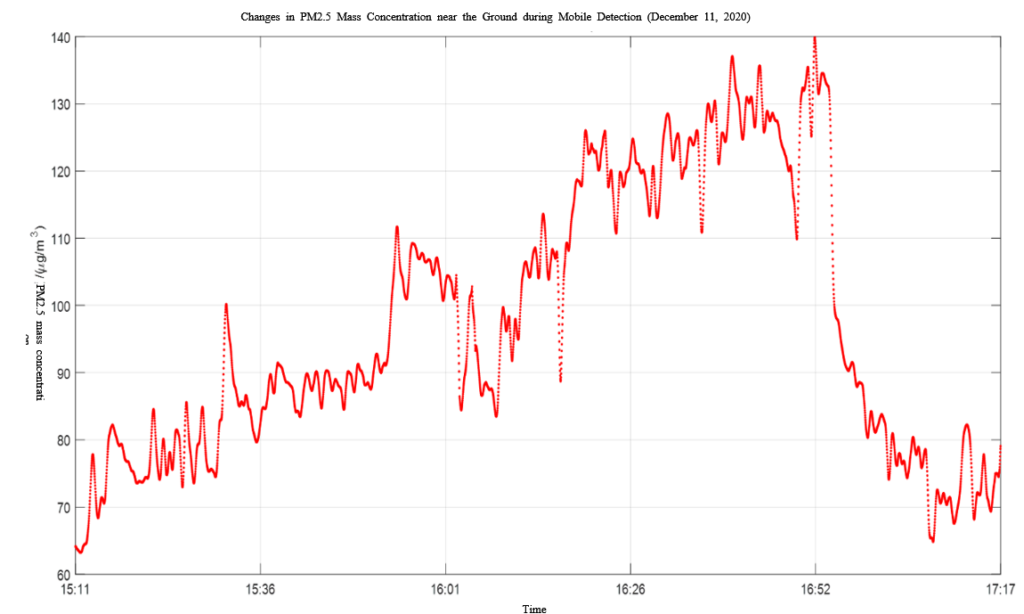
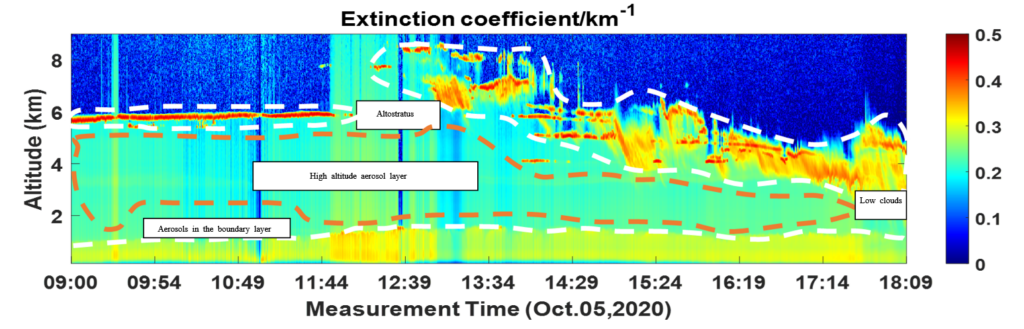
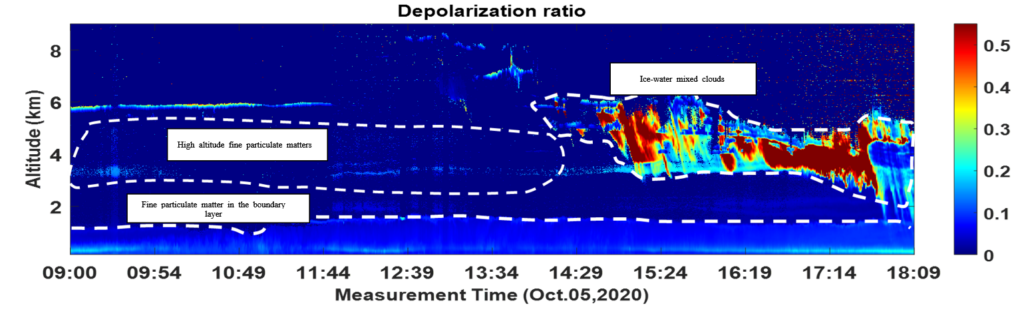
Data | PM2.5, PM10, extinction coefficient, backscattering coefficient, optical thickness, visibility, boundary layer height, depolarization ratio, pollutant type, signal-to-noise ratio, attenuation scattering coefficient, azimuth angle value, pitch angle value, scanning mode, longitude and latitude, ground temperature and humidity, pressure, equipment operation information, etc. |