Using a LiDAR (Light Detection and Ranging) scanner involves several steps, from setup to data collection and analysis. The exact process can vary depending on the type of LiDAR system you’re using (e.g., handheld, drone-mounted, terrestrial, etc.), but here’s a general overview of the steps involved for LiDAR surveying:
Planning the Survey:
- Define the objective of the survey (e.g., topographic mapping, forestry analysis, architectural modeling).
- Determine the area to be scanned and plan the scanning strategy accordingly.
- If using a mobile or airborne system, plan the flight path or survey route.
Setting Up the Equipment:
- Assemble the LiDAR system, ensuring all components like the laser scanner, GPS, and IMU (if applicable) are properly configured.
- Calibrate the system according to the manufacturer’s instructions.
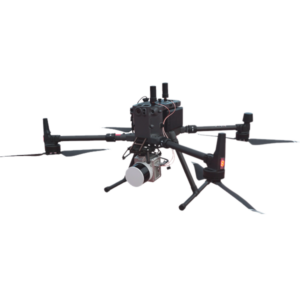
- For drone-mounted systems, attach the LiDAR unit to the drone and ensure it’s securely fastened.
Conducting the Scan:
- For stationary terrestrial scans, position the scanner at various points around the survey area to capture data from multiple angles.
- For mobile or airborne scans, follow the pre-planned route or flight path, ensuring the scanner covers the entire area.
- Activate the scanner to emit laser pulses and collect data. This is usually done via a control software or remote control.
Data Collection:
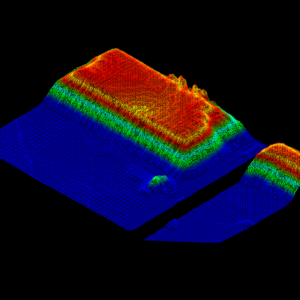
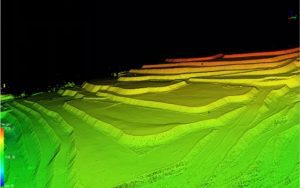
- The LiDAR system will collect a point cloud, representing the scanned area in 3D.
- Ensure that the data is being recorded correctly and check for any gaps in coverage.
Data Processing:
- Download the point cloud data from the LiDAR system.
- Use specialized software to process and analyze the data. This may include filtering, aligning, and modeling the data.
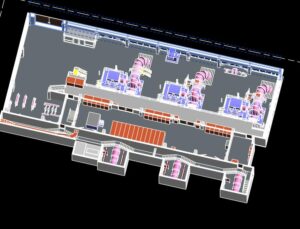
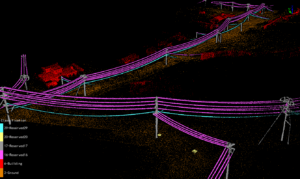
- Depending on the application, you might generate digital elevation models, 3D reconstructions, or other types of visualizations.
Analysis and Interpretation:
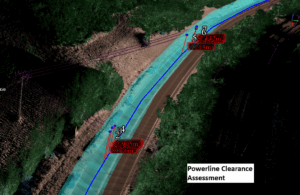
- Interpret the processed data in the context of your project goals.
- For example, in architectural applications, use the data for building modeling; in forestry, analyze tree heights and canopy structures.
Reporting and Further Use:
- Prepare reports or visualizations as needed.
- The data can be used for various purposes, such as planning construction projects, conducting environmental impact assessments, or developing autonomous vehicle navigation systems.


 LiDAR Point Cloud Processing Software - NZ
LiDAR Point Cloud Processing Software - NZ LiDAR Point Cloud Processing Software - NZ
LiDAR Point Cloud Processing Software - NZ LiDAR Point Cloud Processing Software - NZ
LiDAR Point Cloud Processing Software - NZ LiDAR Point Cloud Processing Software - NZ
LiDAR Point Cloud Processing Software - NZ LiDAR Point Cloud Processing Software - NZ
LiDAR Point Cloud Processing Software - NZ